


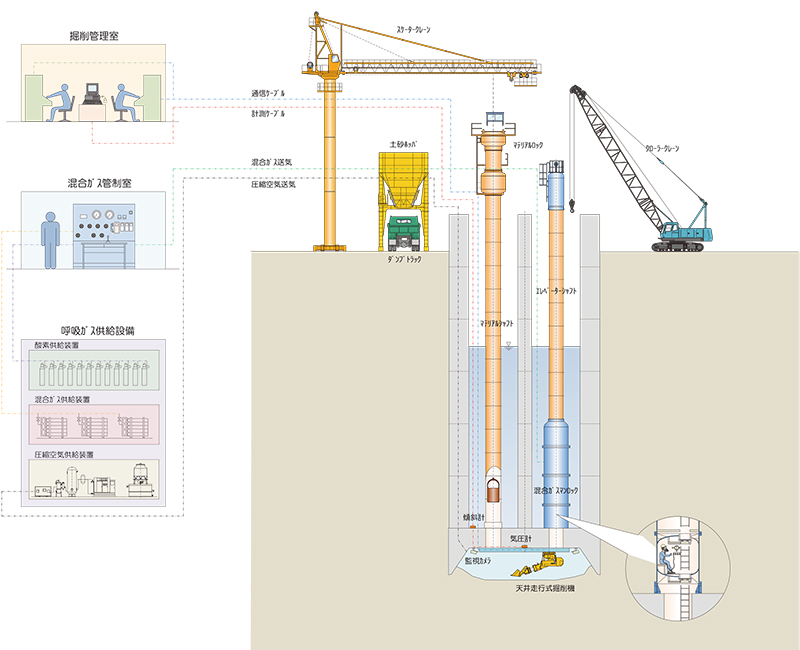
大本組ではニューマチックケーソン工法における作業室内の掘削・排土作業の能力向上、高圧気下の労働環境の改善並びに周辺環境に優しい施工を目指して、ROVOケーソンシステムを発展させてきました。
ROVOケーソン工法は、掘削機の地上遠隔操作による「無人化施工システム」、高気圧作業による減圧症や窒素酔いなどの高気圧障害の発症を防止するための「減圧・呼吸システム」、ならびに「環境対策システム」から成り立っています。
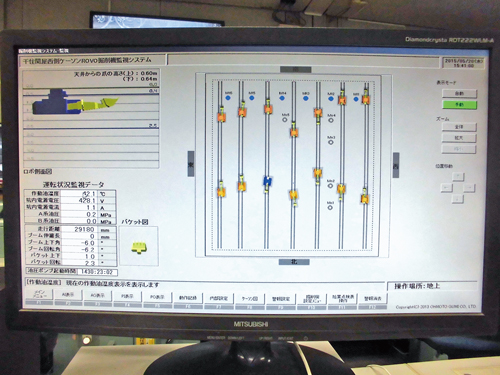
天井走行式掘削機(パケット容量 0.15㎥、025㎥)を採用し、掘削力・掘削能力の向上を追求した高性能・高機能掘削機を完成させました。掘削機の操作は、掘削機に搭載された小型テレビカメラと函内監視カメラから送られてくるモニタ画面を見ながら、掘削管理室の遠隔操作盤により行います。
 天井走行式掘削機(0.15㎥、0.25㎥)
天井走行式掘削機(0.15㎥、0.25㎥) 中央管理室
中央管理室
掘削機の各所に配置されたセンサーにより、掘削機の位置や姿勢情報をパソコン処理することで、過掘り防止や複数台の掘削機の衝突防止などを行っています。
 パソコン処理画面
パソコン処理画面
掘削機の故障などへの対応として掘削機から発せられる各種の異常信号を捕らえ致命的な故障等が発生する前に早期発見できるようにしています。
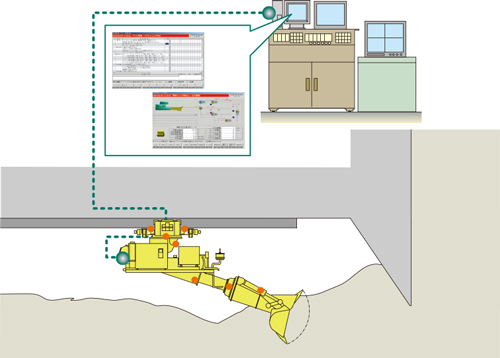 システムイメージ図
システムイメージ図工場の生産ラインや天井クレーンで実績のある、絶縁トロリー給電方式を採用し、掘削機の動力線を無くしました。また、操作線や制御線についてもケーブルレス化するため、雲仙普賢岳等の災害復旧工事で実績を積んだ、SSデジタル無線遠隔操作システムを採用しました。この方式の採用により、移動電線のメンテナンス作業を極力少なくし、フレキシブルな移動が実現しました。
 ケーブルレス掘削機
ケーブルレス掘削機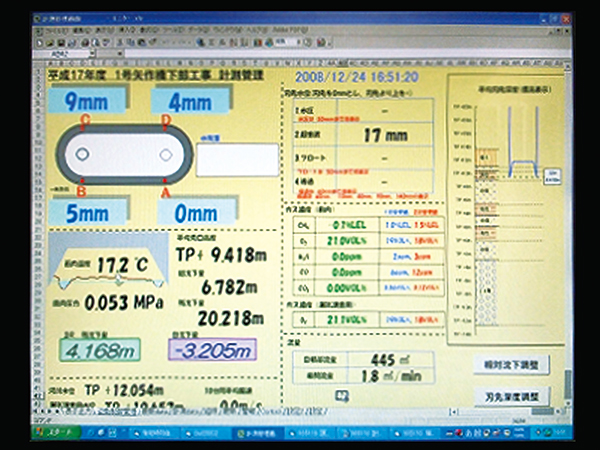 ディスプレイ表示例
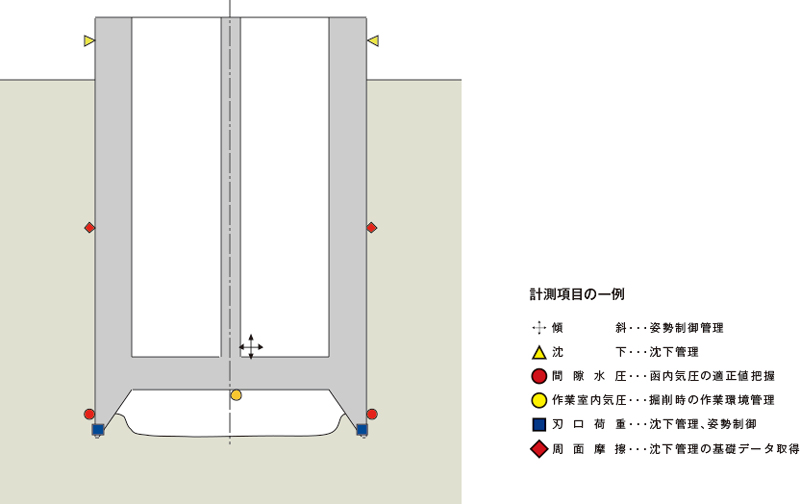
ディスプレイ表示例ケーソン本体の姿勢や沈下管理に関わる情報化施工として、ケーソン躯体内に設置した各種センサーの情報を計測用パソコンにリアルタイム表示してケーソンの挙動を把握します。この情報を基に、的確な掘削方法を速やかに施工へ反映させることで沈設精度、安全性を向上しています。また、作業室内の各種ガス濃度も常時測定管理しています。
 載荷試験装置
載荷試験装置
支持地盤の地耐力を確認するのため、最も気圧が高い環境下で実施する平板載荷試験を、無線遠隔操作により行えるシステムを開発しました。
本システムは油圧ジャッキや傾きを検知するセンサーなどを装備した本体と、遠隔操作・制御するパソコン及びデータ通信を行う無線機で構成され、試験サイクルを自動的に実施する機能も備えています。なお、試験装置は天井走行式掘削機に着脱可能で、作業室内の任意の場所への移動が可能です。
益々大深度化する橋梁基礎や各種立坑などに対応するため、近年では高気圧下の作業を極力少なくした更なる安全性の追求が行われています。当社においてもこれに応えるため無人化施工技術の高度化を図るべく「Super-ROVOケーソン工法」を開発しました。
Super-ROVOケーソン工法の根幹を成す技術は「掘削機無人回収システム」ですが、その他の要素としてはROVOケーソンシステムにおいて採用したシステムに加え、「走行レール間移動システム」により構成されています。
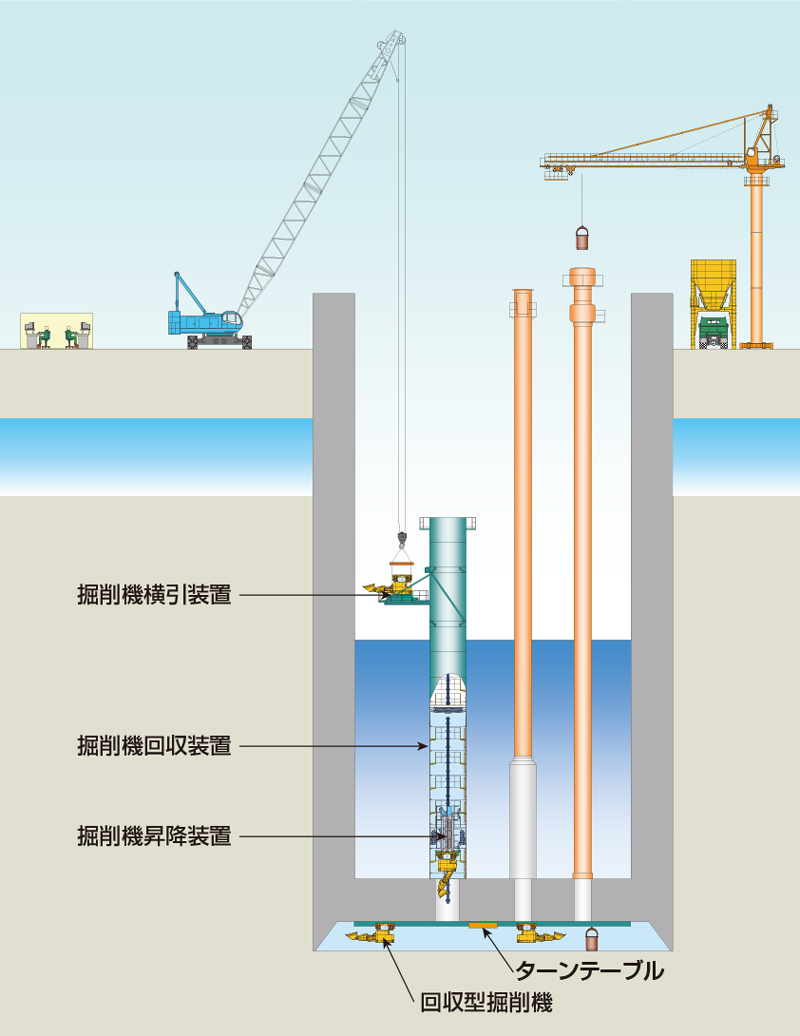
本システムは回収型掘削機と掘削機回収装置により構成されています。
回収型掘削機は、掘削機回収装置内に収まるように、開口部(φ2.0m)を通過できる0.15m3級の掘削機を新たに開発したものです。本掘削機の特徴としては、容易に回収ができるようにするため、動力には絶縁トロリー給電方式を採用し、映像データや各種信号の通信を無線化してケーブルレスを図っています。
掘削機回収装置は、掘削機の通過に必要な空間(φ2.0m)を確保するとともに、簡易なメンテナンスも可能なように作業足場を設け、外形φ3.0 mのロック設備となっています。
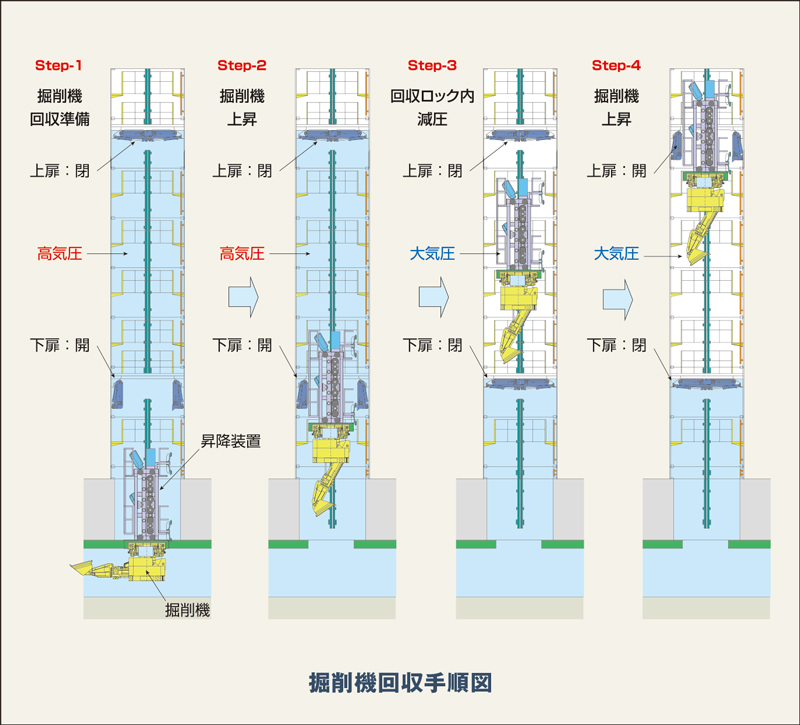
本装置の上下部には開閉扉が配備されており、作業室から掘削機を装置内に回収した後は、下扉を閉じて減圧することにより大気圧下でのメンテナンス作業や掘削機の回収作業ができるようになっています。このため、緊急時以外の高気圧作業がほとんど無くなり、安全性が飛躍的に向上します。
 掘削機横引き装置
掘削機横引き装置 掘削機回収装置
掘削機回収装置 回収型掘削機 0.15㎥
回収型掘削機 0.15㎥ 回収の様子(掘削機上昇中)
回収の様子(掘削機上昇中)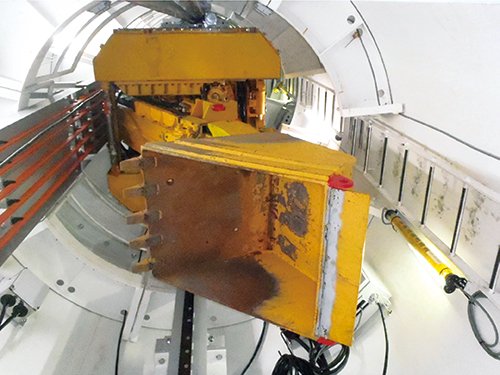 回収の様子(回収装置内)
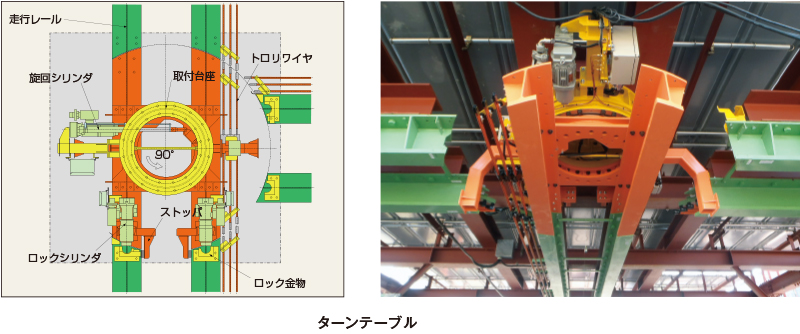
回収の様子(回収装置内)通常のニューマチックケーソンエ法での掘削作業においては、それぞれの掘削機が独立した走行レールに懸架されて自走し、予め設定された掘削範囲を受け持って掘削作業を行います。しかしながら、掘削機回収システムの導入に際しては、掘削機1台毎に回収装置を配備することはスペース的にも経済的にも非効率となります。このため、複数台の掘削機を1つの回収装置で対応する必要があり、その対応策として掘削機がそれぞれの走行レール間を移動できるためのシステムを開発しました。
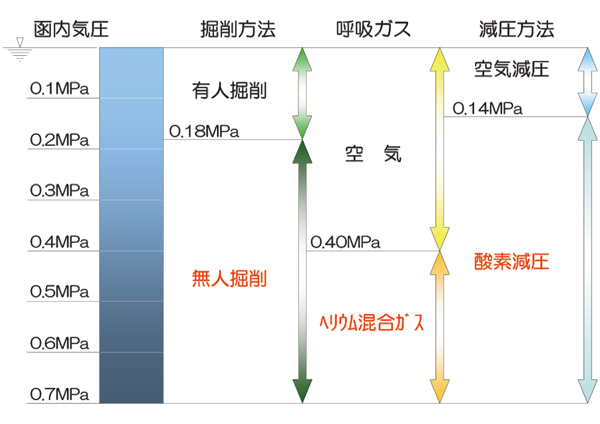 作業気圧と減圧・呼吸システム
作業気圧と減圧・呼吸システム
無人化施工システムにより、飛躍的に安全性の向上が図れたものの、機械設備のメンテナンスや修理・解体時などの特殊な場合は、高気圧環境下での作業が必要となります。
「ニューマチックケーソンエ法のもつ宿命」でも述べましたが、作業気圧が低い場合にはそれほど問題となりませんが、作業気圧の上昇に伴い高気圧障害の危険性が高まってきます。
比較的作業気圧が低い場合には減圧時に空気を呼吸する方法を用いますが、作業気圧が0.14MPaを超える場合は減圧時に純酸素を呼吸する酸素減圧システムを採用します。更に作業気圧が高くなり0.40MPaを超える場合は、作業時の呼吸ガスとして空気の組成の約80%を占める窒素の一部をヘリウムに置換えた混合ガスを使用したヘリウム混合ガス呼吸システムを採用します。
 マンロック内での酸素減圧状況
マンロック内での酸素減圧状況
酸素減圧システムとは、作業気圧が0.14MPaを超える高気圧作業時の減圧に際して、マンロック内の減圧停止圧力が0.12MPaになった時点、あるいは第一減圧停止圧力が0.09MPa以下の場合は第一減圧停止圧力から、酸素呼吸マスクを用いて供給される純酸素を25分間呼吸し、その後酸素呼吸マスクを外してマンロック内の高気圧空気を5分間呼吸(エアブレイクという)することを交互に繰り返して減圧し、大気圧に帰還する方法です。減圧時に酸素を吸入すると、体内に溶け込んでいる窒素が早く肺から出る効果(酸素窓効果)があり、減圧症の原因となる窒素を除去することとなります。
自動減圧システムは、作業気圧と作業時間に応じた減圧作業の一連のプロセス(減圧速度・減圧停止圧力・減圧停止時間)の自動コントロールが可能となります。減圧時のヒューマンエラー防止を図り、マンロック内の環境ガス濃度や温度などの測定と減圧状況監視により厳格な減圧管理を実施することで減圧症の発症リスクを低減します。
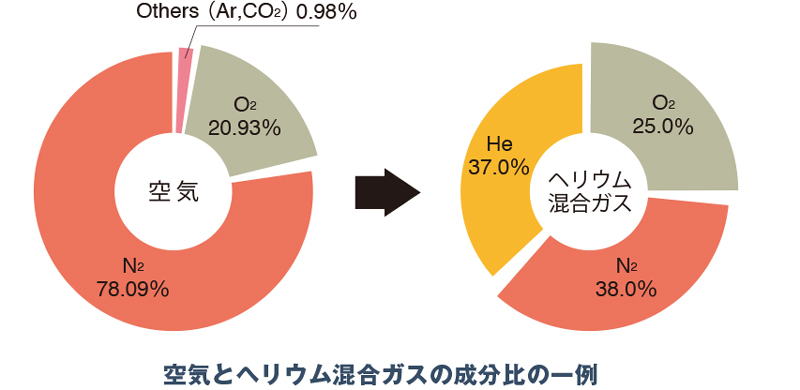
作業気圧が0.40MPaを超える高気圧環境下においては、減圧症や窒素酔いなどの高気圧障害の発症を防止するため、その要因となる窒素をヘリウムに置換えた混合ガスを呼吸しながら作業します。
また、ガスの供給や加減圧及び高圧下実作業状況を混合ガス管制室で一括管理・監視するシステムです。本システムの導入により、0.70MPa (地下水面下-70m)までの施工が可能となりました。平成27年の高気圧作業安全衛生規則改正において窒素分圧が400kPa以下に制限されたため、作業気圧が0.40MPaを超える高気圧作業では環境ガス(空気)呼吸による作業ができなくなり、本システムが必須となりました。
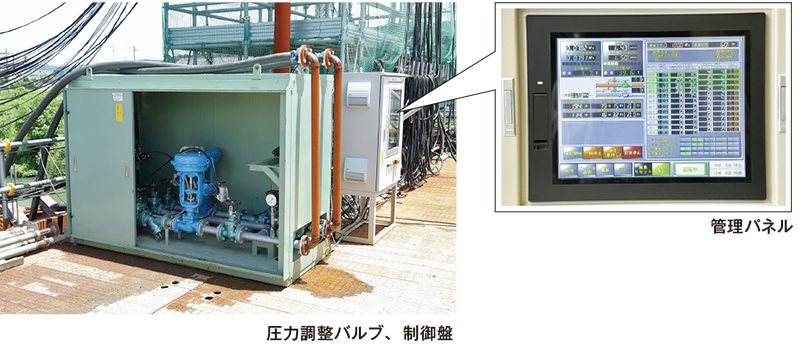
 ヘリウム混合ガスと減圧時に呼吸する酸素ガスを最適な条件で供給・管理します。
ヘリウム混合ガスと減圧時に呼吸する酸素ガスを最適な条件で供給・管理します。 混合ガス呼吸作業状況
混合ガス呼吸作業状況 混合ガスマンロック
混合ガスマンロック 混合ガスマンロック
混合ガスマンロック作業員は、ヘリウム混合ガス専用のマンロックの中で加減圧を行います。
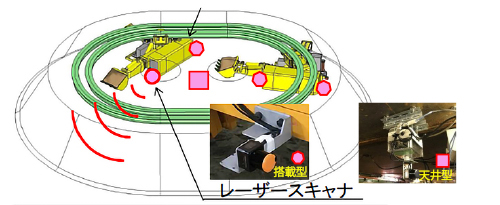
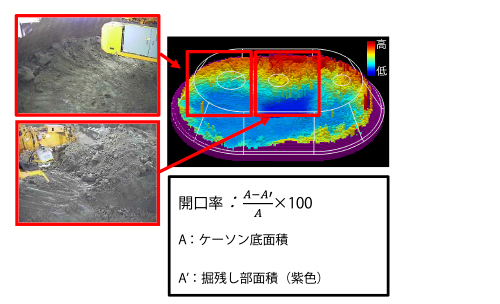
天井走行式掘削機に搭載、または作業室内の天井に設置したレーザースキャナで掘削形状をリアルタイムに可視化し、沈下掘削時の姿勢データと沈設データを統合的に判断し地質毎に最適な掘削順序や開口率を算定します。